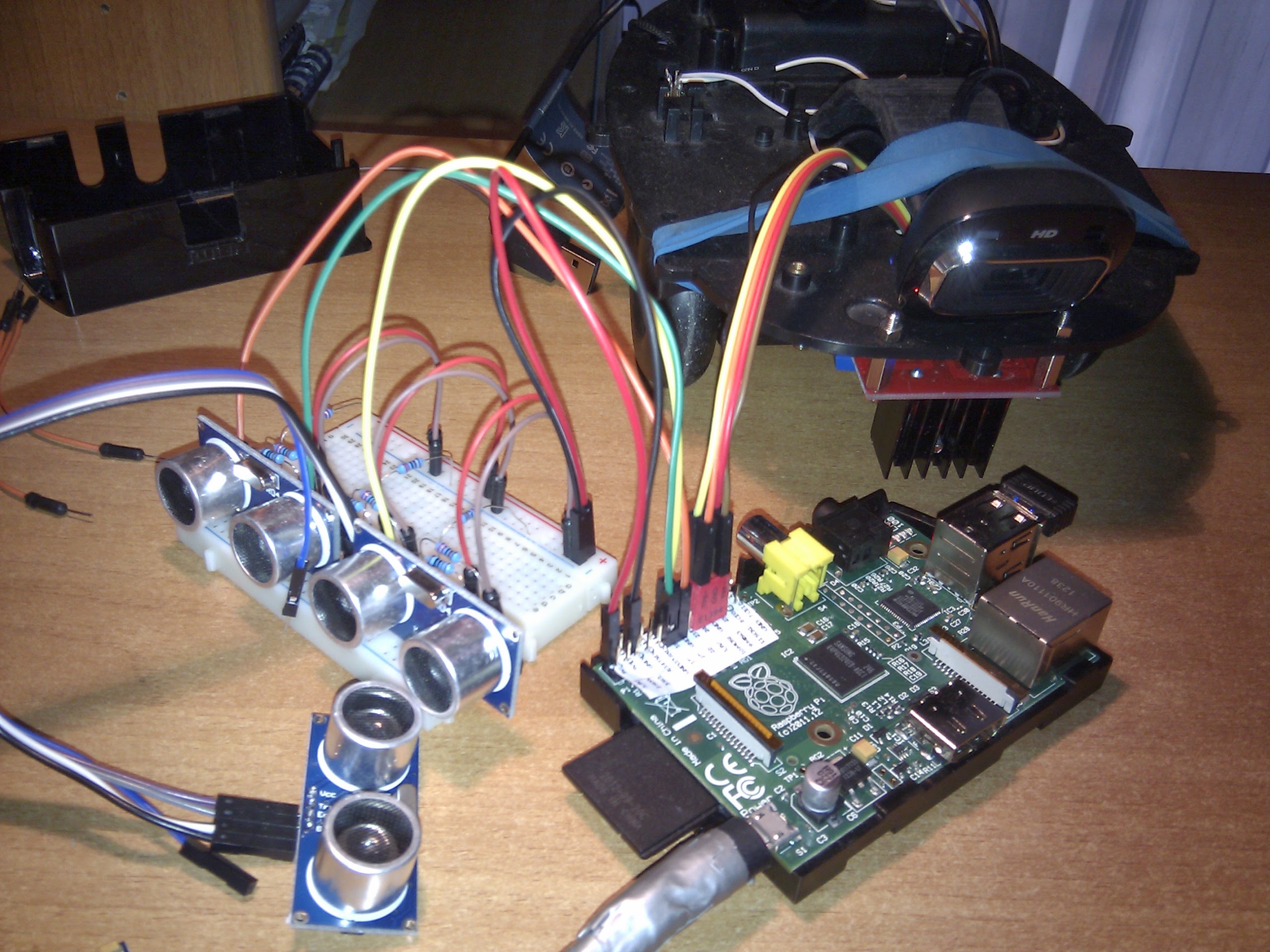
This project is about creating a robot controlled by a Raspberry Pi. The main challenge of the project is to identify obstacles in the robot’s path, using a webcam and the limited computing resources of the credit card sized PC. And do it all in real time. I’ve researched and experimented with several computer vision techniques, such as stereo vision, motion quantization, binocular and monocular vision, background removal. The software used is the excellent computer vision library OpenCV and the chosen programming language is Python. The result is a robot that is reasonably capable of avoiding obstacles although it’s far from perfect. I will add more information as the project evolves.